DRYLWE02 – LoRa Funkfernsteuerung (Dry Contact Controller)

Produktbeschreibung
Dieses Gerät ermöglicht die Steuerung eines Aqua-Scope Motors über potentialfreie Kontakte per LoRa-Funk, auch wenn keine direkte Kabelverbindung möglich ist. Eine stabile LoRa-Punkt-zu-Punkt-Verbindung verlängert das Steuersignal zum Motor.
Das Gerät verarbeitet ein Eingangssignal zur Steuerung des Motors und liefert ein Ausgangssignal zurück, das den aktuellen Motorstatus anzeigt.
- Eingangssignal (I): Steuert den Motor (geschlossen = Motor schließt, offen = Motor öffnet)
- Ausgangssignal (O): Meldet den aktuellen Motorstatus (Open-Collector, bis zu 800 mA)
- Stromversorgung: 3–30 V DC über Schraubklemme oder USB-C
- Serielle Schnittstelle (USB-C) für AT-Befehle und Konfiguration
Niemals beide Stromversorgungen (USB-C und Schraubklemme) gleichzeitig verwenden – dies kann zur Zerstörung der Elektronik führen!
LoRa Direct
LoRa Direct ermöglicht die direkte Funkkommunikation zwischen Aqua-Scope Geräten ohne Netzwerkserver, Gateway oder Infrastruktur. Details siehe LoRa Direct.
Dieses Gerät kann daher nur für die direkte Kommunikation mit anderen Aqua-Scope Geräten eingesetzt werden. Die jeweiligen Geräte müssen untereinander angelernt werden, was entweder über die Aqua-Scope App oder über Tastendrücke erfolgt.
Für jedes LoRa-Direct-Gerät gibt es auch ein entsprechendes LoRaWAN-Gerät, das direkt in einem LoRaWAN-Netz genutzt werden kann.
Installation und Nutzung
Wird das Gerät zusammen mit einem Motor (KFRDRY02 oder BVSDRY02) erworben, sind Motor und Steuerung bereits verbunden und sofort betriebsbereit.
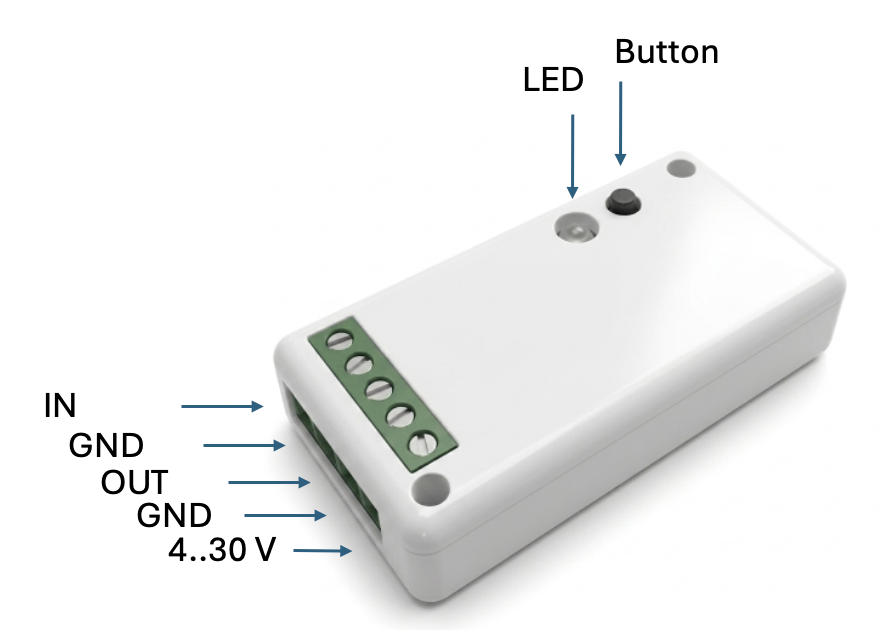
Schraubklemmen / Stromversorgung
Stromversorgung über USB-C oder 3–30 V DC:
| Klemme | Funktion |
|---|---|
| V | Versorgungsspannung (+) |
| G | Ground (−), gemeinsames Bezugspotential |
| I | Input: Steuersignal. Geschlossen gegen G → Motor schließt. Offen → Motor öffnet |
| O | Output: Open-Kollektor, zeigt aktuellen Schaltzustand. Bis 800 mA gegen Masse |
LED-Zustände
| LED | Bedeutung |
|---|---|
| Rot/Grün blinkend | Kein Motor angelernt |
| Gelb dauerhaft | Motor angelernt, noch kein Statussignal empfangen |
| Rot dauerhaft | Ventil geschlossen |
| Grün dauerhaft | Ventil offen |
Anlernen an Motor
Beim KFR-Motor:
- Im Auslieferungszustand blinkt die LED rot/grün (kein Motor angelernt)
- Am Motor die Taste zweimal kurz drücken
- Blinken stoppt → Verbindung hergestellt
Falls bereits ein Motor angelernt ist: Über das 1-Tasten-Menü (Befehl 1) den bestehenden Eintrag löschen. Die LED kehrt zum rot/grünen Blinken zurück.
Alternativ kann ein Dreifachklick auf den Taster den Werksreset-Modus starten: Der bestehende Motoreintrag wird gelöscht und das Gerät beginnt sofort mit der Suche nach einem neuen Motor.
Für nicht werkseitig gepaarte Geräte müssen Geräte-ID und Kommunikationsschlüssel über die serielle Schnittstelle (AT-Befehle ATC+PEUI und ATC+PKEY) konfiguriert werden.
Motor-Emulation
Über das 1-Tasten-Menü oder die serielle Schnittstelle (AT-Befehl ATC+MOTOR) umschaltbar. In diesem Modus verhält sich das Gerät wie ein Motor: Der Ausgang liefert ein Steuersignal für einen externen Stellmotor oder ein Magnetventil. Die lokale Taste öffnet/schließt den Motor und die LED zeigt den aktuellen Zustand an.
Serielle Schnittstelle
USB-C emuliert eine serielle Konsole (ein Datenkabel ist erforderlich, kein reines Ladekabel!). Die Steuerung erfolgt über AT-Befehle.
Gerätespezifische AT-Befehle
| Befehl | Beschreibung |
|---|---|
ATC+PEUI=xxxxxxxx | 8-stellige Geräte-ID des Zielmotors setzen. =? fragt den aktuellen Wert ab |
ATC+PKEY=xxxxxxxxxxxxxxxx | 16-stelligen Geräte-Schlüssel des Zielmotors setzen. =? fragt den aktuellen Wert ab |
ATC+VALVE=?|0|1 | Motor steuern: 0 = schließen, 1 = öffnen, ? = Status abfragen |
ATC+MOTOR=?|0|1 | Modus umschalten: 0 = Fernsteuerung (LoRa Direct), 1 = Motor-Emulation, ? = Status |
ATC+OUT=0|1 | Ausgangskanal (O) direkt schalten |
ATC+BUTTON=0|1|? | Tastersperre: 0 = Default, Taster wird genutzt, 1 = Taster gesperrt, ? = Status |
ATC+LINK | Linktest starten (Verbindungsqualität prüfen) |
Zusätzlich werden alle AT-Befehle des RAK 3172 Moduls unterstützt: RAK3172 AT-Befehlsreferenz.
1-Tasten-Menü
Taste 4 Sekunden halten → Menü wird aktiviert (grüne LED blinkt schnell).
Bedienung:
- Kurzer Klick: Zum nächsten Befehl weiterschalten (LED blinkt die Befehlsnummer)
- Langer Druck: Vorgewählten Befehl ausführen
- Timeout: Menü beendet sich nach einigen Sekunden automatisch
| Nr. | Befehl | Beschreibung |
|---|---|---|
| 1 | Motor-Eintrag löschen | Löscht Geräte-ID und Schlüssel. LED kehrt zu rot/grün blinkend zurück |
| 2 | Linktest | Prüft die Funkverbindungsqualität. Ergebnis: 0 Blinker = keine Verbindung, 1–5 Blinker = Signalstärke (1 = gerade ausreichend, 5 = ausgezeichnet) |
| 3 | Schlafmodus | Ein/Aus umschalten. Im Schlafmodus reduzierter Stromverbrauch; LED und Ausgangspin-Statusanzeige deaktiviert |
| 4 | LoRa Direct ↔ LoRaWAN | Zwischen LoRa Direct (Werkseinstellung) und LoRaWAN-Modus umschalten |
| 5 | Motormodus | Motor-Emulation ein- oder ausschalten (siehe Motor-Emulation) |
Lieferumfang
- Hauptgerät
Technische Daten
| Parameter | Wert |
|---|---|
| SKU | DRYLWE02 |
| Plattform | STM32WLE5CCU6 |
| Funk | LoRa Direct, SF9, Codierung 4/5, EU868 |
| Frequenz | 868–869 MHz, 4 dBm (2,5 mW) |
| Reichweite | >2 km (TX 22 dB) |
| Schutzgrad | IP20 |
| GPIOs | Ausgang max. 20 mA, Eingang min. 10 µA |
| Stromverbrauch | Tiefschlaf 30 µA, RX 8,5 mA, TX 87 mA (20 dBm, 868 MHz) |
| Versorgungsspannung | 3–30 V DC oder USB-C |
| Betriebstemperatur | -40 °C bis +85 °C |
| Lagertemperatur | -65 °C bis +125 °C |
| Luftfeuchtigkeit | 0–80% |
| Abmessungen | 40 × 24 × 14 mm |
| Gewicht | 10 g (ohne Batterie) |